
Why the Industry Moved Beyond CAN-Only Networks and What Makes It Different
For decades, CAN bus has been the backbone of in-vehicle communication. It is reliable, deterministic, and well suited for control-heavy systems like powertrain, chassis, and body electronics.
So why did the automotive industry introduce Automotive Ethernet?
The answer comes down to scale. Modern vehicles outgrew what CAN-only architectures can realistically support. Understanding why Ethernet was needed, why regular Ethernet was not well suited, and how Automotive Ethernet fits alongside existing networks is key to understanding modern vehicle design.
Why CAN-Only Networks Hit Their Limits
CAN was designed for reliable message-based communication between embedded controllers. For many years, bandwidth demands were low and predictable. That changed quickly.
Modern vehicles now include:
- Multiple cameras and high-resolution displays
- Radar, lidar, and sensor fusion systems
- Centralized compute and software-defined features
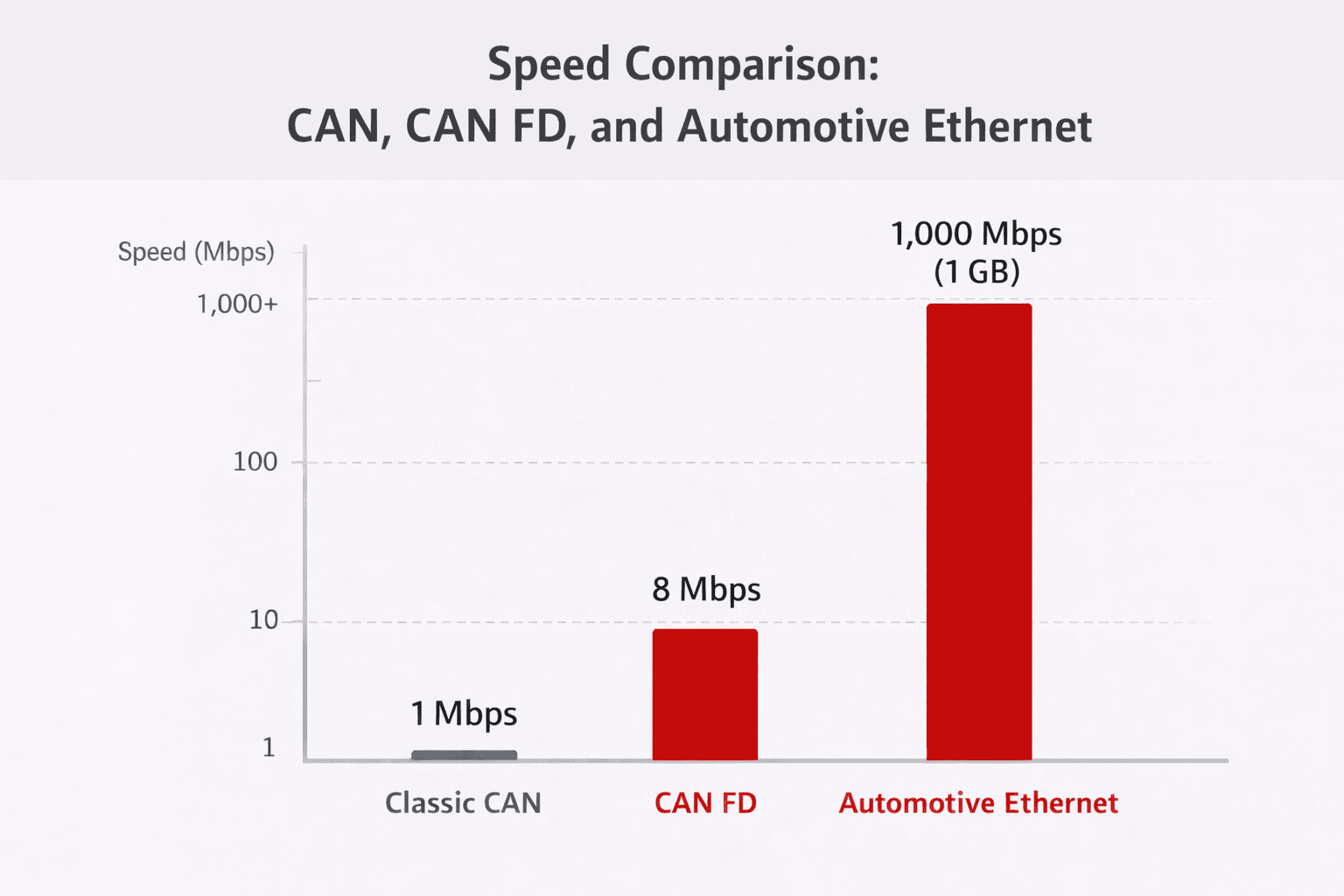
Even with CAN FD, bandwidth is still measured in kilobits to a few megabits per second due to limited data packet sizes. That is more than enough for control signals, but not nearly enough for data-heavy systems like ADAS or infotainment.
As vehicle complexity increased, OEMs faced a choice: - Add more CAN buses and gateways, which increases cost and complexity
- Introduce a high-bandwidth backbone network
Automotive Ethernet became that backbone.
Moving to Ethernet
While Ethernet can provide significantly higher bandwidth over CAN FD, it is not a drop-in replacement:
- Ethernet is intended to be Point to Point requiring switches when there are more than two nodes.
- Much of the available Ethernet hardware was not suited for the temperature ranges needed for the automotive industry.
- Typical Ethernet uses 2 or 4 twisted pairs that increases cost and wiring complexity.
- Significantly different implementations in software make Ethernet a much larger change than the migration from CAN to CAN FD.
While Ethernet provided a clean way to move large data streams there were costs and other technical details that needed to be addressed.
What Makes Automotive Ethernet Different from Regular Ethernet
At first glance, Ethernet looks the same everywhere. Vehicles, however, are a very different environment from offices or data centers.
Automotive Ethernet is specifically engineered for in-vehicle use.
Single-Pair Ethernet
The single biggest difference is that Automotive Ethernet uses a single twisted pair putting it on par with the 2 wires used for CAN.
- Reduced cable weight
- Lower cost
- Easier routing through the vehicle
Standards like 100BASE-T1 and 1000BASE-T1 are designed specifically for automotive applications.
Automotive-Grade Physical Layers
Automotive Ethernet PHYs are built to survive:
- Wide temperature ranges
- Constant vibration and shock
- High levels of electrical noise and EMI
This is why regular Ethernet adapters and switches cannot simply be plugged into a vehicle network.
Determinism by Design
A common misconception is that Ethernet is not deterministic.
In automotive systems, determinism is achieved through:
- Full-duplex point-to-point links
- Switched network architectures
- Time-sensitive networking where required
The result is predictable latency suitable for high-bandwidth and time-aware systems.
Vehicle-Specific Protocols on Top
Automotive Ethernet is not just about moving packets faster. It supports vehicle-specific communication through protocols such as:
- SOME/IP for service-oriented communication
- DoIP for diagnostics over IP
- AVB and TSN for synchronized data streams
These protocols are a major reason Automotive Ethernet behaves very differently from traditional IT Ethernet.
Automotive Ethernet Complements CAN
Automotive Ethernet does not replace CAN as it has proven reliability and is extremely cost effective.
In real vehicles:
- CAN and CAN FD handle control and safety-critical communication
- Automotive Ethernet handles data-heavy systems and network backbones
- Gateways connect CAN and Ethernet domains
This coexistence allows OEMs to scale vehicle capabilities without abandoning proven technologies.
Why This Matters for Development and Testing
As Automotive Ethernet becomes more common, engineering challenges change:
- Network bring-up and configuration become more complex
- Latency and packet loss must be measured and understood
- Diagnostics span multiple network types
- Tools must understand automotive protocols, not just raw Ethernet frames
What Comes Next
With the fundamentals in place, the next question is practical:
When should CAN, CAN FD, or Automotive Ethernet be used, and how do they work together in real vehicles?
That is the focus of Blog #2 in this series.





