
Testing Automotive Ethernet: Development vs Validation Challenges
Automotive Ethernet changes more than vehicle architecture. It also changes how engineers develop, debug, and validate vehicle networks.
For years, CAN-based testing focused primarily on message timing, arbitration, and signal-level behavior. Ethernet introduces an entirely different layer of complexity:
- Packet-based communication
- Higher bandwidth data streams
- Service-oriented communication
- Network synchronization
- Multi-network coexistence
As vehicles become more software-defined and Ethernet adoption grows, testing moves from isolated ECU validation to full system-level network validation.
Why Automotive Ethernet Testing Is More Complex Than CAN
CAN networks are relatively predictable.
Messages are small, deterministic, and transmitted over shared buses with well-understood behavior. Ethernet networks operate differently.
Automotive Ethernet introduces:
- Switched network architectures
- Large packetized data streams
- Dynamic service discovery
- IP-based diagnostics
- Time-sensitive communication
This means engineers are no longer validating only:
- Signal values
- Message timing
- Bus utilization
- Latency
- Packet loss
- Synchronization
- Service availability
- Network routing behavior
Development vs Validation: Different Goals
One of the biggest shifts with Automotive Ethernet is that development and validation teams often need different types of visibility and tooling.
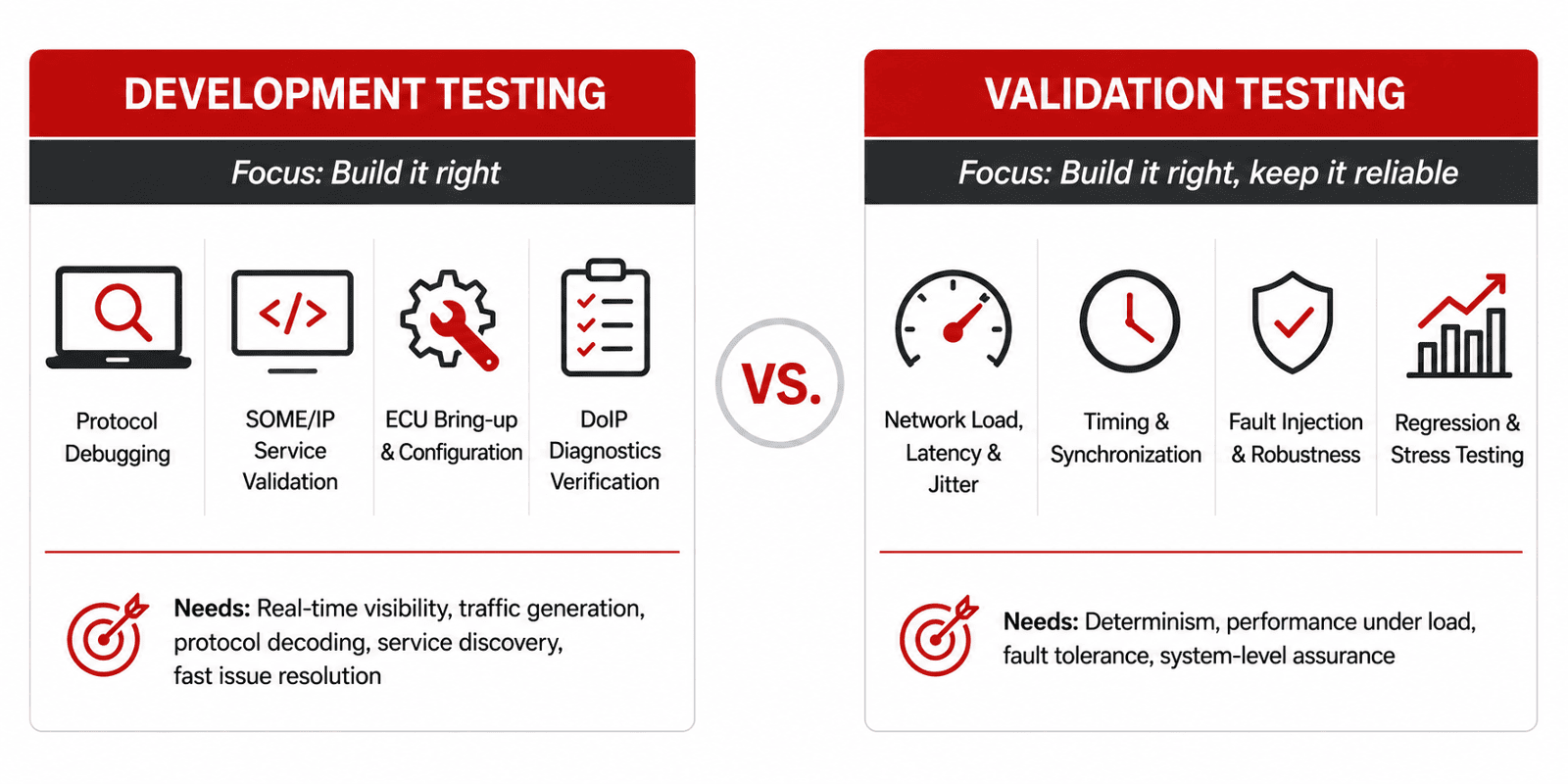
Development Testing
- ECU bring-up
- Protocol debugging
- SOME/IP service validation
- Gateway configuration
- DoIP diagnostics verification
Engineers often need:
- Real-time packet visibility
- Traffic generation and stimulation
- Protocol decoding
- Service discovery monitoring
At this stage, flexibility and fast debugging are critical.
Validation Testing
- Network load testing
- Latency and jitter analysis
- Synchronization validation
- Fault injection
- Regression testing
- Multi-network interaction testing
- CAN
- CAN FD
- Ethernet
- LIN
- Gateways and domain controllers
Timing and Synchronization Challenges
- In sequence
- Within expected timing windows
- Without excessive jitter or packet loss
- Sensor fusion
- Object detection
- Vehicle decision-making
- Clock synchronization
- End-to-end latency
- Stream prioritization
- Deterministic delivery under load
Gateways Become Critical Test Points
Modern vehicles rely heavily on gateways to connect CAN, CAN FD, and Ethernet networks.
This creates several challenges:
- Message translation accuracy
- Diagnostic routing correctness
- Timing alignment between networks
- Security filtering behavior
- Emulate vehicle traffic
- Verify mixed-network behavior
- Reproduce edge-case failures
- Validate diagnostic communication paths
Diagnostics Over Ethernet Changes Validation
- Faster diagnostics
- Faster ECU flashing
- Better scalability
- IP addressing and routing
- Ethernet session management
- Multi-ECU diagnostic traffic
- Gateway behavior during diagnostics
Network Visibility Is More Important Than Ever
- How traffic moves across domains and zones
- Which systems are generating load
- Where bottlenecks occur
- How failures propagate through the architecture
- System-level validation
- Network-wide analysis
- Cross-domain debugging
Automotive Ethernet Requires New Testing Strategies
- Ethernet packet analysis
- CAN and LIN monitoring
- Gateway simulation
- Fault injection
- Time synchronization analysis
- Automated regression testing
Looking Ahead
- Zonal architectures
- Centralized compute
- Software-defined vehicles
- Advanced ADAS systems
Up Next
In the next post, we will look at practical Automotive Ethernet tooling and what engineers need to get started with development, diagnostics, monitoring, and validation in mixed-network vehicle environments.





