
Understanding Zonal Architectures and the Role of Automotive Ethernet
Vehicle network design is undergoing a fundamental shift. For years, automotive architectures were built around domains. Powertrain, body, infotainment, and ADAS systems each had their own controllers, networks, and wiring. That model worked. But as vehicles became more complex, it also became harder to scale. Zonal architectures are the industry’s response to that complexity, and Automotive Ethernet is what makes them possible.
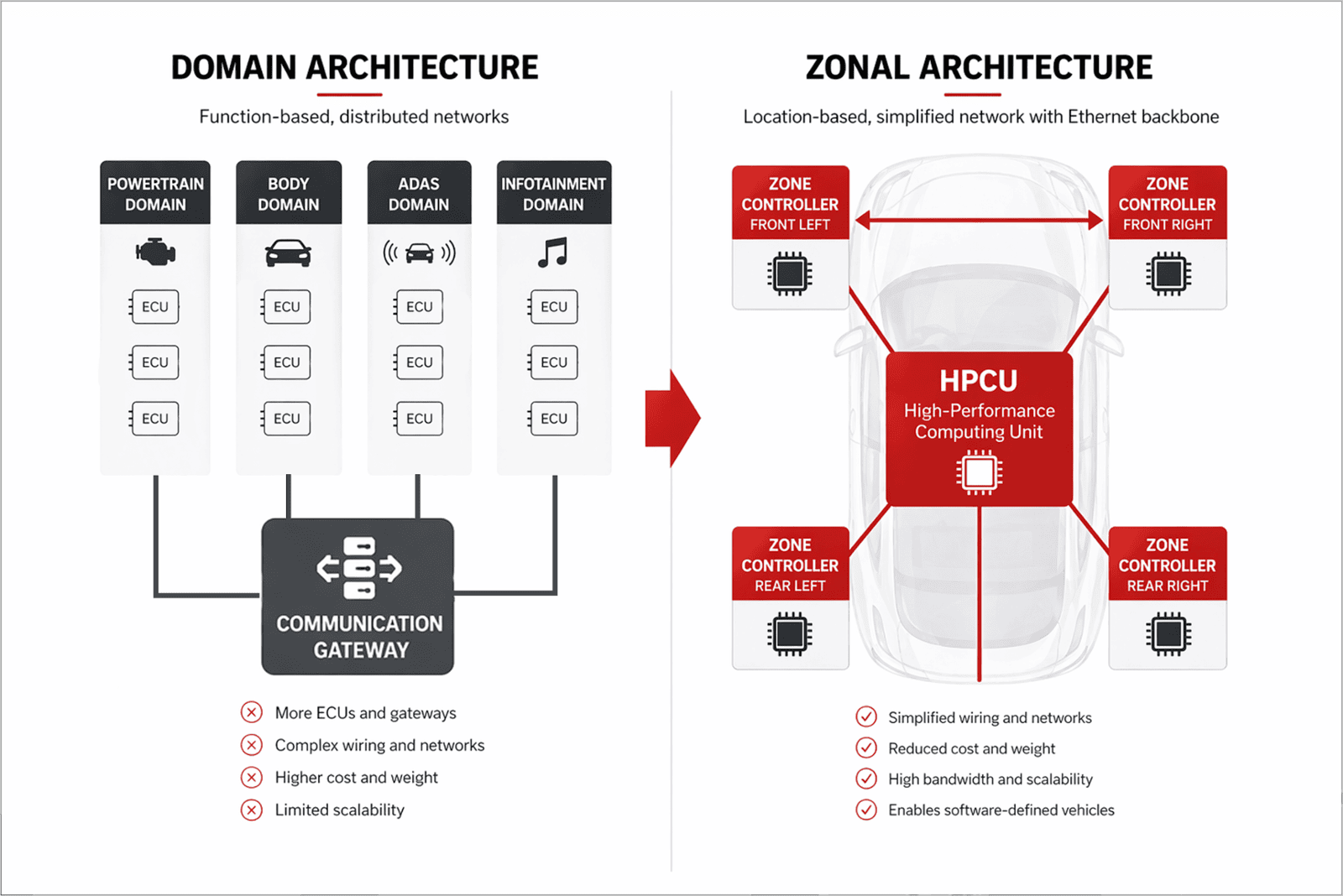
From Domain-Based to Zonal Architectures
In a traditional domain architecture, functions are grouped by type.
For example:
- A powertrain domain controller manages engine and transmission systems
- A body controller manages lighting, doors, and HVAC
- An ADAS controller handles perception and driver assistance
Each domain typically has:
- Its own ECUs
- Its own network segments
- Its own wiring paths
As more features are added, this leads to:
- Increased wiring complexity
- More gateways between domains
- Higher cost and weight
- Limited scalability
What Changes with Zonal Architectures
Zonal architectures reorganize the vehicle based on physical location, not function.
Instead of grouping by system type, the vehicle is divided into zones:
- Front left
- Front right
- Rear left
- Rear right
Each zone has a zone controller that manages all sensors and actuators in that area, regardless of function.
This approach:
- Reduces wiring length and complexity
- Simplifies network design
- Centralizes compute resources
- Makes the system easier to scale
Ethernet Becomes the Vehicle Backbone
Zonal architectures depend on a high-speed network that connects zone controllers to centralized compute.
That network is Automotive Ethernet.
Instead of many isolated buses, Ethernet acts as a backbone:
- Connecting zone controllers
- Linking to high-performance computing nodes
- Supporting high-bandwidth data flows
- Enabling communication between distributed systems
This shift allows data to move efficiently across the entire vehicle, not just within individual domains.
CAN and LIN still exist, but they move closer to the edge:
- LIN handles simple actuators and HMI functions
- CAN and CAN FD manage local control communication
- Ethernet connects higher-level systems and compute
Impact on Diagnostics
Zonal architectures also change how diagnostics work.
In traditional architectures:
- Diagnostics often run over CAN
- Access is tied to specific networks or domains
- Tools communicate with individual ECUs
In zonal architectures:
- Diagnostics increasingly run over Ethernet using DoIP
- Access is more centralized
- Gateways route requests across the entire vehicle
This enables:
- Faster data transfer
- More efficient ECU access
- Better visibility across systems
However, it also introduces new challenges:
- Ensuring proper routing across zones
- Managing network load during diagnostics
- Maintaining timing and reliability across Ethernet
Impact on Software Deployment
Software updates are another area significantly affected by this shift.
In older architectures:
- Updates are performed ECU by ECU
- Bandwidth limitations slow the process
- Coordination across domains is complex
With zonal architectures and Ethernet:
- Software can be deployed more centrally
- High-speed networks reduce update time
- Over-the-air updates become more practical
This supports:
- Frequent feature updates
- Bug fixes without service visits
- Continuous improvement of vehicle functionality
Enabling the Software-Defined Vehicle
Zonal architectures are not just about wiring or network efficiency.
They are a key step toward the software-defined vehicle.
In this model:
- Functionality is driven by software, not fixed hardware
- Compute resources are centralized
- Systems communicate through flexible, service-based architectures
- Features can be updated and extended over time
Automotive Ethernet enables this by providing:
- The bandwidth required for data-heavy systems
- The flexibility needed for service-oriented communication
- The connectivity required for centralized compute
Without Ethernet, this level of integration would not be possible.
Why This Matters for Development and Validation
For engineers, zonal architectures introduce new considerations:
- Debugging shifts from isolated ECUs to system-level behavior
- Network visibility must span CAN, LIN, and Ethernet
- Timing and data flow must be validated across zones
- Diagnostics and updates must work across the entire architecture
Testing is no longer just about individual components. It is about how the entire system behaves together.
Looking Ahead
Zonal architectures are still evolving.
As vehicles continue to adopt centralized compute and high-speed networking, we can expect:
- Greater reliance on Ethernet
- Increased use of time-sensitive networking
- More software-driven functionality
- Continued reduction in network complexity at the physical level
The architecture is changing, but the goal remains the same: building systems that are scalable, reliable, and easier to manage over time.
Up Next
Understanding the architecture is one step. The next challenge is making sure it works correctly in real-world conditions.
In the next post, we will explore testing Automotive Ethernet, including the differences between development and validation and what makes Ethernet testing more complex than CAN.





