
Automotive Ethernet Protocols in Practice: From SOME/IP to ADAS Data Streams
Automotive Ethernet provides the bandwidth modern vehicles need. But bandwidth alone does not solve the communication challenges inside a vehicle.
Once Ethernet became part of the vehicle architecture, the industry needed protocols designed specifically for automotive systems. These protocols define how services are discovered, how diagnostics operate, and how large data streams move between ECUs.
Three of the most common are SOME/IP, DoIP, and AVB/TSN. Each solves a different problem in the vehicle network.
Why Automotive Ethernet Protocols Exist
Traditional automotive networks like CAN are message-based. Every ECU knows exactly which message IDs to listen for.
Ethernet networks operate differently. They are packet-based, and communication is typically organized around services and endpoints rather than fixed message IDs.
- Modern vehicles also require capabilities that earlier networks were never designed to support, including:
- High-bandwidth sensor data
- Service-oriented software architectures
- Large-scale diagnostics and software updates
- Precise timing and synchronization
Automotive Ethernet protocols address these needs while maintaining the reliability required for vehicle systems.
SOME/IP: Service-Oriented Communication
SOME/IP (Scalable Service-Oriented Middleware over IP) is one of the most widely used protocols on Automotive Ethernet networks due to it’s compatibility with AUTOSAR standards.
Instead of fixed messages, SOME/IP allows ECUs to offer services. Other ECUs can discover and request those services dynamically.
For example:
- A camera ECU may offer a video processing service
- A domain controller may offer vehicle state information
- An ADAS system may request sensor data from multiple sources
SOME/IP enables this type of communication through:
- Service discovery
- Request and response messaging
- Event notifications
This architecture supports the move toward software-defined vehicles, where software components interact more like distributed applications than isolated ECUs.
DoIP: Diagnostics Over Ethernet
Diagnostics have traditionally run over CAN using UDS (Unified Diagnostic Services).
As Ethernet networks became common in vehicles, the industry introduced Diagnostics over IP (DoIP) to carry diagnostic messages over Ethernet.
DoIP allows engineers and service tools to:
- Access ECUs over Ethernet
- Perform diagnostics more quickly
- Transfer large data sets efficiently
- Support faster software updates
Because Ethernet supports significantly higher bandwidth than CAN, operations like flashing firmware or retrieving large diagnostic logs can be completed much faster.
In mixed-network vehicles, gateways often route diagnostics between CAN-based ECUs and Ethernet-based ECUs so diagnostic tools can communicate across the entire vehicle.
AVB and TSN: Managing Time-Sensitive Data
High-bandwidth data streams introduce another challenge: timing.
ADAS systems often depend on synchronized data from multiple sensors. Cameras, radar, and lidar must deliver data with predictable timing so the vehicle can build an accurate model of its surroundings.
This is where AVB (Audio Video Bridging) and TSN (Time-Sensitive Networking) come into play.
These technologies extend Ethernet with capabilities that support:
- Time synchronization across ECUs
- Guaranteed bandwidth allocation
- Predictable latency
- Deterministic communication
TSN, in particular, is becoming increasingly important as vehicles rely more heavily on synchronized sensor data.
ADAS Systems Drive the Need for Bandwidth
ADAS and automated driving systems generate enormous amounts of data.
Consider a modern vehicle equipped with multiple cameras, radar sensors, and other perception systems. Each sensor produces continuous streams of information that must be processed, combined, and analyzed in real time.
These systems require:
- High bandwidth
- Reliable data delivery
- Precise synchronization
Automotive Ethernet provides the physical network for this data, while protocols like SOME/IP and TSN help ensure the data moves efficiently and arrives when it is needed.
Without these protocols, managing this level of communication would be extremely difficult.
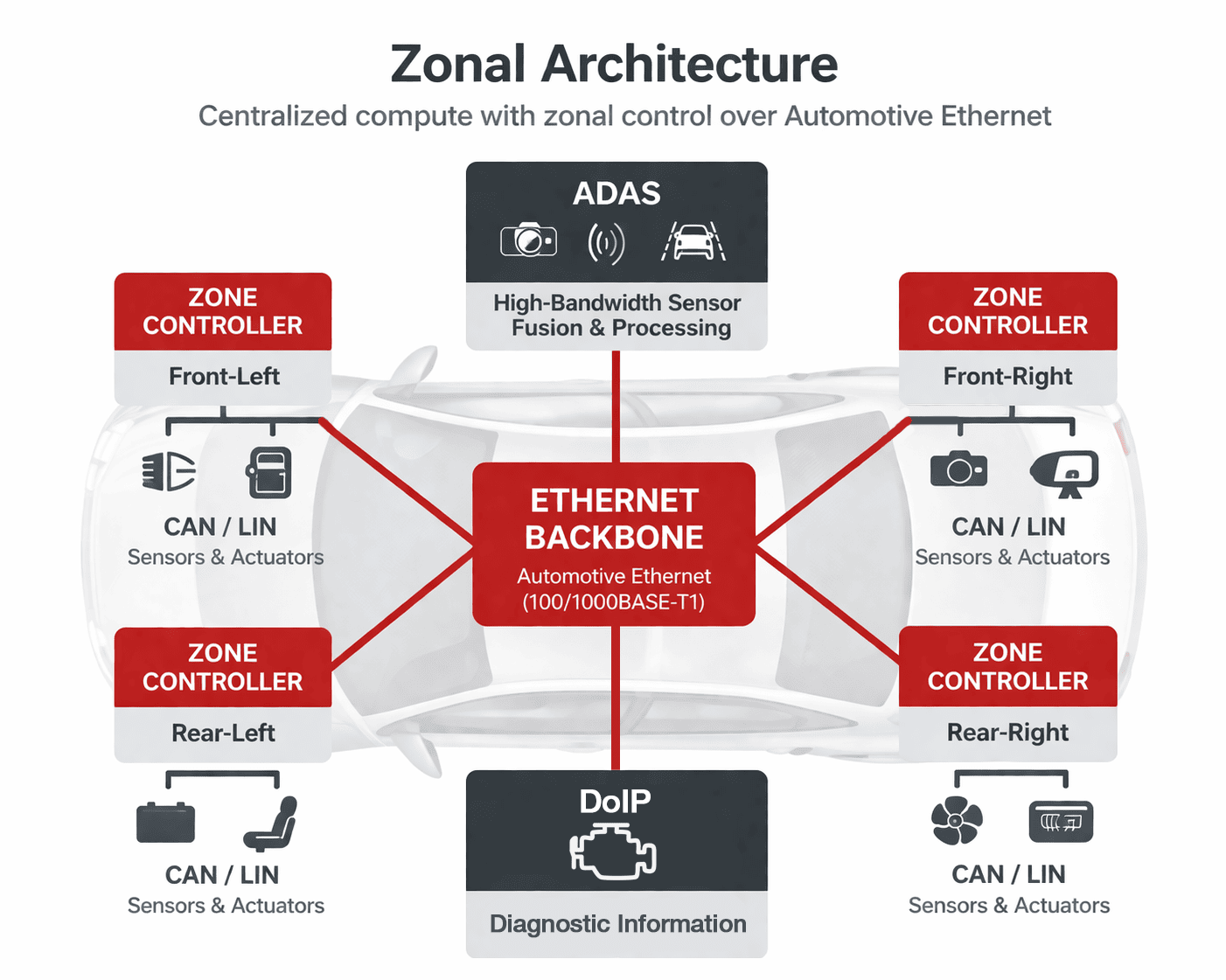
How Data Flows Between ECUs
In a modern Ethernet-enabled vehicle, data often flows through multiple layers of the network.
A simplified example might look like this:
- Sensors capture raw data such as camera frames or radar measurements.
- Sensor ECUs transmit data over Automotive Ethernet.
- Domain or zonal controllers aggregate and process information from multiple sensors.
- Processed data is shared with other vehicle systems through service-based communication such as SOME/IP.
- Diagnostic and maintenance functions operate over DoIP when needed.
This architecture allows high-bandwidth data to move efficiently between key computing nodes while maintaining compatibility with other vehicle networks such as CAN and LIN.
Up Next
Understanding the protocols is only part of the picture. The way vehicles are architected around these networks is evolving as well.
In the next post, we will explore zonal architectures and how Automotive Ethernet is reshaping vehicle network design.





