
CAN, CAN FD, and Automotive Ethernet:
When to Use Each and How They Coexist
The Strengths of LIN
Lin is a single wire communication network. Best suited for small low bandwidth networks where precise real time control is not required
Where LIN excels:
HMI interface controls such as turn signal and power seat controls.
Actuators that control seats, windows, HVAC systems and others.
Lighting systems
Alternator control
LIN is limited by both speed and data payload size. Even with these limitations it works well in communication with non-critical systems
Where LIN struggles:
Slow, 20Kbps max
Lack of message arbitration requires a Commander/Responder network
Limited message ID range
When bandwidth requirements increase, the next step is moving up to a CAN network.
The Strengths of Classic CAN
Classic CAN was built for reliable, deterministic control communication. It remains one of the most efficient ways to move small, time-critical messages between ECUs.
Where CAN excels:
Powertrain control
Chassis systems
Body electronics
Safety-critical signaling
Peer to Peer communications make the network architecture simple.
While Classic CAN has a maximum bit rate of 1 Mbps, it typically runs at 500 Kbps or less. That is more than sufficient for control messages that are only a few bytes long.
Where CAN struggles:
Large data payloads
High-resolution sensor data
Software updates
Aggregating multiple high-data-rate systems
When bandwidth requirements increase, adding more CAN buses increases wiring, gateways, and architectural complexity.
What CAN FD Improves
CAN FD was introduced to extend the life of CAN. The migration from Classic CAN to CAN FD is low cost and low effort because the network topology is the same as Classic CAN.
It increases:
Data rate during the data phase
Maximum payload size per frame
CAN FD can operate at higher data rates than classic CAN and supports payloads up to 64 bytes per frame. This provides several benefits.
Significantly reduces time of ECU flashing operations.
Larger message payload reduces message traffic providing improving data throughput for diagnostic and calibration activities.
However, CAN FD still operates in the megabit range. It improves efficiency but does not fundamentally solve high-bandwidth demands such as camera streams or centralized compute data flows.
Where Automotive Ethernet Becomes Necessary
When systems require tens or hundreds of megabits per second, CAN and CAN FD are no longer practical.
Automotive Ethernet is required for:
ADAS camera data
Radar and lidar aggregation
Infotainment backbones
Centralized domain or zonal controllers
High-speed data logging
Diagnostics over IP
With standards such as 100BASE-T1 and 1000BASE-T1, Ethernet provides the bandwidth needed for data-heavy systems while maintaining predictable performance through switched architectures.
It is not about replacing CAN. It is about enabling what CAN was never designed to carry
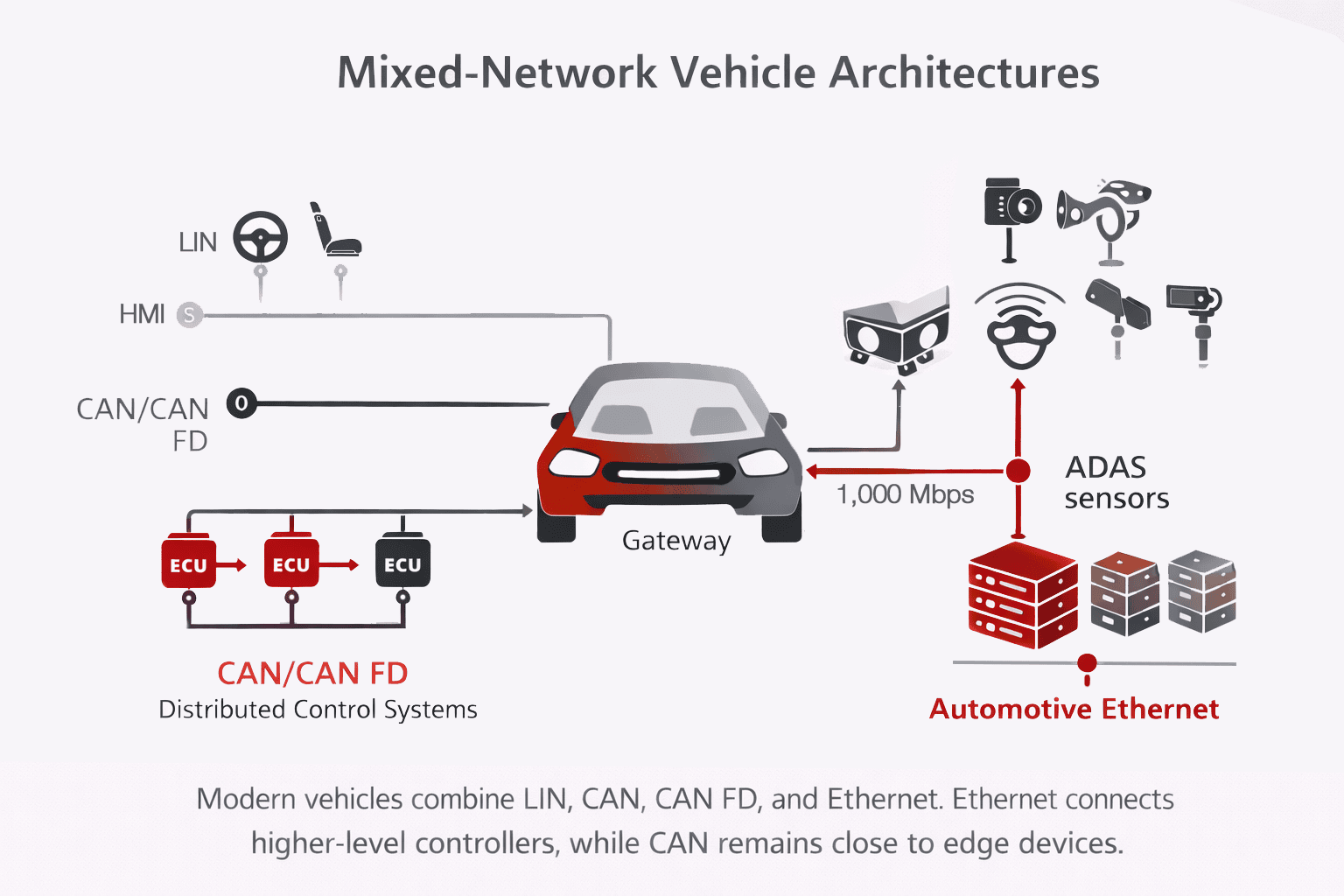
Mixed-Network Vehicle Architectures
Modern vehicles can combine all of these technologies to optimize cost and vehicle complexity.
A simplified example looks like this:
LIN handles low speed HMI and actuator functions.
CAN/CAN FD are used for distributed control systems.
Automotive Ethernet acts as a high-bandwidth backbone between domain or zonal controllers.
Instead of dozens of isolated networks, Ethernet often connects higher-level controllers, while CAN remains close to edge devices such as sensors and actuators.
This layered approach keeps control communication simple and deterministic while allowing data-intensive systems to scale.
The Role of Gateways
Gateways are the bridge between networks.
They:
Translate messages between CAN, CAN FD, and Ethernet
Manage diagnostics across multiple networks
Enforce security and filtering rules
Control traffic flow between domains
Provide the needed Ethernet Switch functionality needed for Automotive Ethernet connectivity.
In mixed-network vehicles, gateways become critical integration points. Misconfiguration, timing mismatches, message mapping errors, or diagnostic routing issues often surface here first.
As Ethernet adoption increases, gateway complexity also increases. Engineers must understand both message-based CAN communication and packet-based Ethernet communication to debug effectively.
In development and validation environments, dedicated vehicle communication gateways are often used to simulate or manage traffic between CAN and Automotive Ethernet networks before full vehicle integration. These platforms allow teams to validate message translation, diagnostic routing, and network behavior under controlled conditions.
For example, development-grade solutions such as Accurate Technologies’ Vehicle Communication Gateway can be used to bridge CAN, CAN FD, and Automotive Ethernet during bench testing. This allows engineers to verify coexistence scenarios and gateway behavior early in the development cycle, reducing risk later in vehicle-level validation.
Choosing the Right Network
A useful way to think about it:
If the system is very low bandwidth with limited nodes, LIN is ideal.
If the system is control-heavy and low bandwidth, CAN is ideal.
If more efficiency and larger payloads are required, CAN FD is appropriate.
If the system moves large volumes of data or connects high-level controllers, Automotive Ethernet is necessary.
Most modern vehicles use all three.
The goal is not to pick one winner. The goal is to architect them correctly together.
Why This Matters for Development and Validation
As vehicles adopt mixed-network architectures, engineering challenges shift:
Debugging requires visibility across multiple network types.
Gateway behavior becomes a critical validation point.
Diagnostics must work seamlessly across CAN and Ethernet.
Timing and bandwidth constraints must be validated at the system level.
Understanding how these networks coexist is essential for building and validating reliable vehicle architectures.
Up Next





